
The Tangible Media Group(TMG) at the Massachusetts Institute of Technology (MIT) desires to change the method humans act with physical objects by developing materials which will change their type and look dynamically based on digital information. Operating towards this goal, TMG has developed the inFORM, a “Dynamic shape Display” that lets users render 3D content with physical objects.
From having physical buttons that are number pads that made it terribly simple for us to move with a phone and to be ready to dial. and, as we tend to place more and more options into these mobile phones, it’s become more durable and tougher to possess these physical affordances for each of these completely different cases. and therefore the only way to create all of this work is to own virtual representations. however that loses the tactile feeling. And TMG makes tactile feedback and tactile interaction into digital interfaces and still provide this flexibility and also the multiplicity of forms of interaction.

Researchers from the tangible media group at MIT’s media research laboratory have developed ‘inFORM’. The system has been created to communicate with the physical world around it, like moving objects on a table’s surface. in the future, the technology may be accustomed mediate interaction through geospatial information, like maps, parcel models and subject area models.
Past analysis on shape displays has primarily targeted on ren-dering content and user interface components through shape out-put, with less emphasis on dynamically ever-changing UIs. Researchers tend to propose utilizing shape displays in 3 alternative ways to mediate interaction: to facilitate by providing dynamic physical affordances through shape modification, to restrict by guiding users with dynamic physical constraints, and to manipulate by activating physical objects. They tend to define potential interaction techniques and introduce Dynamic Physical Affordances and Constraints with our inFORM system, designed on top of a state-of-the-art shape display, that provides for variable stiffness rendering and real-time user input through direct touch and tangible interaction. a group of motivating examples demonstrates how dynamic affordances, constraints and object actuation will create novel interaction possibilities.
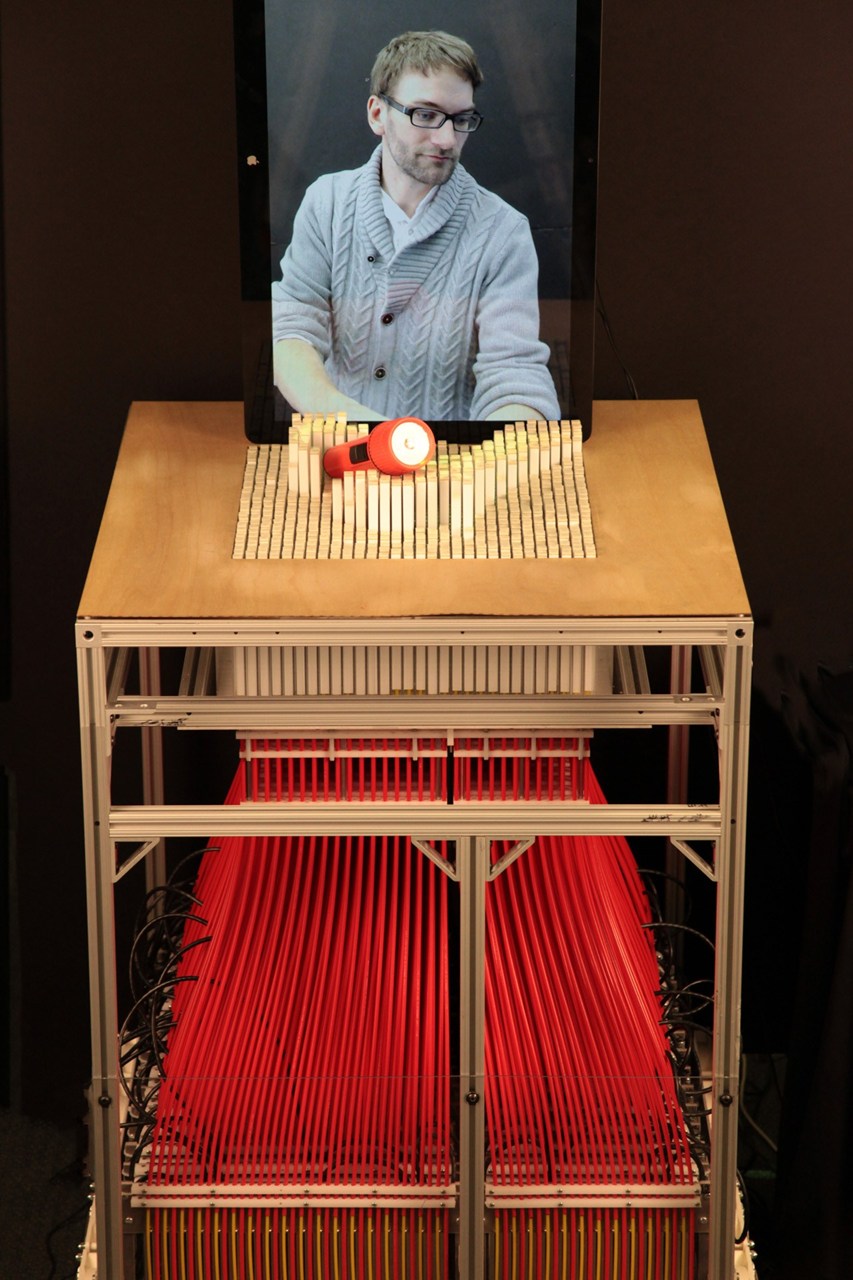
The surface is created of around 900 pins long, vertically assembled sq. sticks organized in sq. area. In many ways, it works like one of those executive pin toys that enable the user to imprint shapes onto a surface created out of many pins. Every pin are often rapt up and down severally by actuators to form a topographic rendering of an object, it would be a city setup, a data visualization or just the outline of someone’s hands. The physical type of the surface are often increased with mapped projections, because of an overhead Kinect and projector.
InFORM works by creating use of a projector, associate Xbox Kinect sensor, 900 pins, linkages and actuators, and a pc. every pin — which might move up and down concerning a hundred millimetres — is concerning 9.535 millimetres x 9.535 millimetres and acts as a real-life pixel. The pins are spaced 3.175 millimetres apart and controlled by microcontrollers (small computers) that confer with one another on a really quick network. A projector is employed to show color on top of every pin and a Kinect is used for mid-air gestures and to trace objects and touches on the table.

The MIT researchers shown a variety of applications for the surface, as well as turning the surface into associate interactive surface with buttons rising on demand and making the surface recreate any 3D object shown to a Kinect, as an example a user’s hands area unit shown as pixelated, Lego-like appendages. similarly the surface are often created to notice and interact with physical objects placed thereon by neutering its pure mathematics. So, as an example, you would possibly place a ball on top of the surface and also the pins can assemble into a ramp to move the ball or produce a wall round the ball to contain it.
When an object is placed on a form display, it physically interacts with the shapes generated by the display. In this project the physical objects as tokens and also the shapes interacting with them as constraints. Constraints like wells, slots and ramps limit the movement of the token through their shape, thus guiding user interaction, As our system will sense how tokens act with constraints, it will dynamically modify their parameters (shape, size, location, orientation) to adapt to user input or to reflect dynamical program states. Wells act as containers to carry objects. Slots are grooves that constrain the direction within which a user will move a token.
The inForm works on Geospatial information, like maps, GIS, piece of land models and subject field models. modern planners and designers will read 3D designs physically and higher perceive, share and discuss their designs. Urban planners also can use this . additionally, inFORM would enable 3D Modelers and Designers to image their 3D styles physically without 3D printing. Volumetric information like medical imaging CT scans will be viewed in 3D physically and interacted with. TMG also exploring applications in medical or surgical simulations.
The inFORM is “quite expensive” to make in the laboratory, with each of the 900 actuators — the tiny motors controlling each pin — cost accounting between $US20 and $US30.
So, there are several ways to use this kind of new things inside the research business. apart from that, this can be really amazing. we are so excited to check wherever inForm can take not only the market business, but the technological movement as a whole.